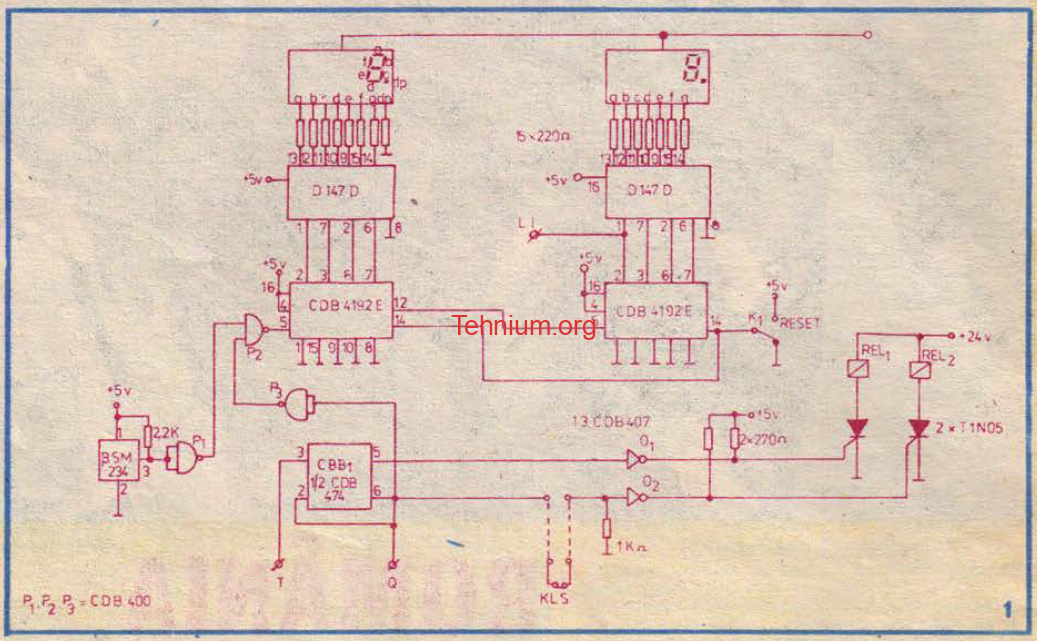
Iată textul extras din imagine, corectat ortografic (inclusiv adaptarea literei „î” în interiorul cuvintelor, conform normelor actuale) și cu punctuația optimizată pentru o citire cursivă:Dispozitivul electronic de măsurare a adâncimilor cuprinde următoarele module funcționale: numărătorul și sistemul de comandă al motorului, generatoarele de impulsuri și lumină intermitentă, motorul electric și sursa de alimentare.Numărătorul și sistemul de comandă al motorului sunt prezentate în figura 1. În momentul alimentării cu tensiune, sonda de măsură se află la capătul superior al cursei; contactorul KLS este deschis, iar circuitul basculant bistabil CBB1 are starea Q = 0 și Q̄ = 1. Deoarece KLS este deschis, intrările operatorilor de putere cu colectorul în gol CDB407 (O1, O2) sunt la nivelul logic 0. Ieșirile corespunzătoare ale operatorilor având același nivel logic 0, ambele relee (Rel 1, Rel 2) vor fi neanclanșate.Pornirea dispozitivului se face prin acționarea comutatorului K2 (fig. 2).
Ca urmare, pe intrarea de tact T apare un impuls, CBB1 basculează, iar releul Rel 1 se anclanșează, sonda coboară și validează numărarea impulsurilor senzorului magnetic SM234, activat de doi magneți permanenți plasați pe circumferința unei role de textolit. Numărătorul este format din două circuite integrate de tipul CDB4192 (numărător sincron, zecimal, reversibil). Impulsurile date de senzorul magnetic sunt numărate, decodificate cu două integrate D147D și afișate pe două celule cu 7 segmente de tip HP. Cu ajutorul porții P2 (ȘI-NU), numărarea este validată numai pentru nivelul logic 0 de la ieșirea Q̄ a bistabilului CBB1, adică numai pentru situația când sonda coboară.
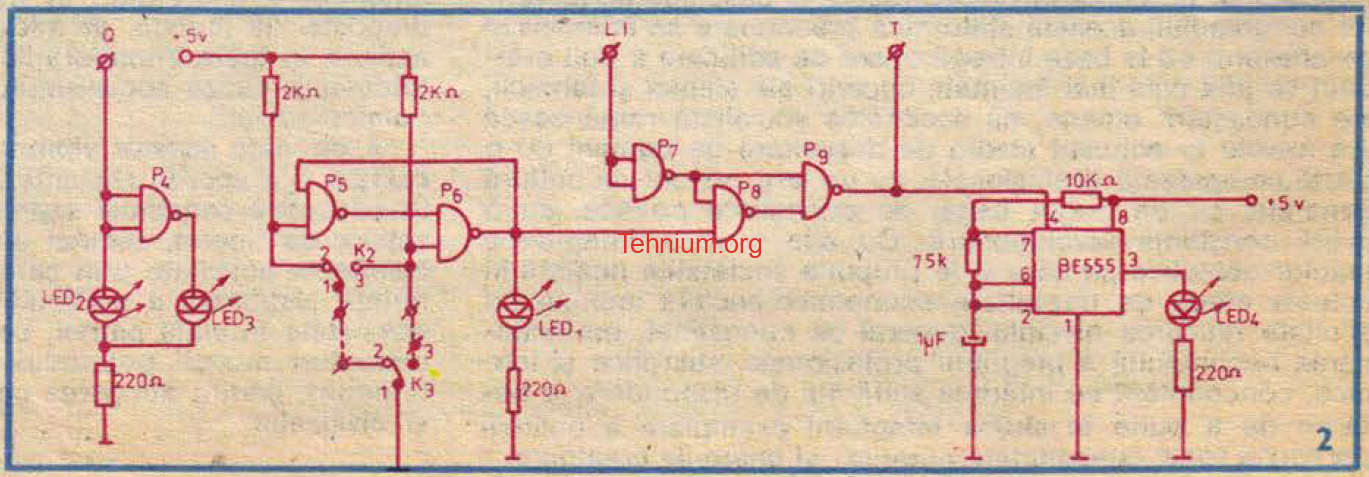
Numărătorul este adus în starea inițială (resetat) cu ajutorul comutatorului K1.În cazul în care adâncimea de măsurat depășește limita (doi metri în cazul machetei), la intrarea de tact T a CBB1 se primește nivelul logic 1, de la pinul 2 LI al numărătorului, prin intermediul porților P7, P8 și P9 (fig. 2), ceea ce determină bascularea bistabilului, schimbarea sensului de rotație al motorului (și, deci, ridicarea sondei), blocarea numărătorului și apariția unei lumini intermitente care semnalizează depășirea limitei de măsurare.Generatorul de impulsuri este format din porțile P5 și P6 ale circuitului integrat CDB400 (fig. 2). Ele formează un circuit basculant bistabil de tip RS, care anulează efectul de vibrație al contactelor K2 și K3. Fără acest modul, CBB1 de tip D produce atâtea basculări câte fronturi crescătoare conține semnalul furnizat de contactele elastice ale comutatoarelor, iar starea inițială nu ar fi niciodată sigură.
Starea de ieșire a bistabilului RS este semnalizată cu ajutorul diodei LED1. Ea poate fi schimbată atât cu comutatorul K2 (de pornire), care se află pe panoul frontal, cât și cu K3, care este acționat de articulația sondei la atingerea adâncimii măsurate. Închiderea lui K3 determină bascularea bistabilului CBB1, blocarea numărătorului, memorarea (afișarea) adâncimii măsurate și anclanșarea releului Rel 2, care schimbă sensul de rotație al motorului și ridică sonda. La capătul superior al cursei este acționat contactorul KLS, care oprește motorul și resetează numărătorul.Cele două momente ale segmentului de măsură (coborârea și urcarea) sunt semnalizate cu ajutorul a două LED-uri. Coborârea sondei este marcată prin aprinderea diodei LED1 (Q = 1), iar urcarea prin LED2, care se aprinde pentru starea Q = 0 a CBB1.Generatorul de lumină intermitentă este format din circuitul integrat βE555, conectat în regim de astabil.
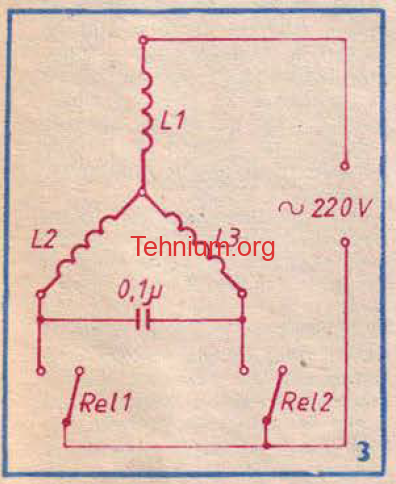
Frecvența de oscilație este dată de grupul RC și vizualizată cu dioda LED4. Acest modul semnalizează depășirea limitei de măsurare în momentul când la intrarea T se primește nivelul logic 1.Motorul electric care acționează sonda este un servomotor asincron monofazat cu trei înfășurări (fig. 3). Pornirea motorului se face, de regulă, în sensul de urcare, în funcție de starea bistabilului CBB1; inductanțele L1 și L3 constituie înfășurările principale, iar L2 este alimentată cu o tensiune defazată cu 90°, jucând rol de înfășurare de pornire. La schimbarea sensului de rotație a servomotorului, inductanța L3 devine înfășurarea de pornire, iar L2 devine înfășurarea principală.Sursa de alimentare furnizează două tensiuni: 24V c.c. nefiltrată pentru alimentarea releelor și 5V c.c. stabilizată pentru alimentarea circuitelor integrate. Sursa stabilizată este realizată cu circuitul integrat βA723, tranzistorul serie BD136 și este prevăzută cu protecție la scurtcircuit.